The type double function is imsl_d_nonlin_least_squares.
Required Arguments
voidfcn (intm, intn, floatx[], floatf[]) (Input/Output) User-supplied function to evaluate the function that defines the least-squares problem where x is a vector of length n at which point the function is evaluated, and f is a vector of length m containing the function values at point x.
intm (Input) Number of functions.
intn (Input) Number of variables where n≤m.
Return Value
A pointer to the solution x of the nonlinear least-squares problem. To release this space, use imsl_free. If no solution can be computed, then NULL is returned.
IMSL_XGUESS, floatxguess[] (Input) Array with n components containing an initial guess. Default: xguess = 0
IMSL_JACOBIAN, voidjacobian (intm, int n, floatx[], floatfjac[], intfjac_col_dim) (Input) User-supplied function to compute the Jacobian where x is a vector of length n at which point the Jacobian is evaluated, fjac is the computed m×n Jacobian at the point x, and fjac_col_dim is the column dimension of fjac. Note that each derivative ∂fi/∂xj should be returned in fjac[(i-1)*fjac_col_dim+j-1]
IMSL_XSCALE, float xscale[] (Input) Array with n components containing the scaling vector for the variables. xscale is used mainly in scaling the gradient and the distance between two points. See keywords IMSL_GRAD_TOL and IMSL_STEP_TOL for more detail. Default: xscale[] = 1.
IMSL_FSCALE, floatfscale[] (Input) Array with m components containing the diagonal scaling matrix for the functions. The i-th component of fscale is a positive scalar specifying the reciprocal magnitude of the i-th component function of the problem. Default: fscale[] = 1.
IMSL_GRAD_TOL, floatgrad_tol (Input) Scaled gradient tolerance. The i-th component of the scaled gradient at x is calculated as
where g = ∇F(x), s = xscale, and
Default: grad_tol =
in double where ɛ is the machine precision.
IMSL_STEP_TOL, floatstep_tol (Input) Scaled step tolerance. The i-th component of the scaled step between two points x and y is computed as
where s = xscale.
Default: step_tol = ɛ2/3 where ɛ is the machine precision.
IMSL_REL_FCN_TOL, floatrfcn_tol (Input) Relative function tolerance. Default: rfcn_tol = max (10-10, ɛ2/3), max (10-20, ɛ2/3) in double, where ɛ is the machine precision
IMSL_ABS_FCN_TOL, floatafcn_tol (Input) Absolute function tolerance. Default: afcn_tol = max (10-20, ɛ2), max (10-40, ɛ2) in double, where ɛ is the machine precision.
IMSL_MAX_STEP, floatmax_step (Input) Maximum allowable step size. Default: max_step = 1000 max (ɛ1, ɛ2) where,
s = xscale, and t = xguess
IMSL_INIT_TRUST_REGION, floattrust_region (Input) Size of initial trust region radius. The default is based on the initial scaled Cauchy step.
IMSL_GOOD_DIGIT, intndigit (Input) Number of good digits in the function. Default: machine dependent.
IMSL_MAX_ITN, intmax_itn (Input) Maximum number of iterations. Default: max_itn = 100.
IMSL_MAX_FCN, intmax_fcn (Input) Maximum number of function evaluations. Default: max_fcn = 400.
IMSL_MAX_JACOBIAN, intmax_jacobian (Input) Maximum number of Jacobian evaluations. Default: max_jacobian = 400.
IMSL_INTERN_SCALE Internal variable scaling option. With this option, the values for xscale are set internally.
IMSL_TOLERANCE, floattolerance (Input) The tolerance used in determining linear dependence for the computation of the inverse of JTJ. For imsl_f_nonlin_least_squares, if IMSL_JACOBIAN is specified, then tolerance = 100 ×imsl_f_machine(4) is the default. Otherwise, the square root of imsl_f_machine(4) is the default. For imsl_d_nonlin_least_squares, if IMSL_JACOBIAN is specified, then tolerance = 100 ×imsl_d_machine(4) is the default. Otherwise, the square root of imsl_d_machine(4) is the default. See imsl_f_machine.
IMSL_RETURN_USER, floatx[] (Output) Array with n components containing the computed solution.
IMSL_FVEC, float**fvec (Output) The address of a pointer to a real array of length m containing the residuals at the approximate solution. On return, the necessary space is allocated by imsl_f_nonlin_least_squares. Typically, float*fvec is declared, and &fvec is used as an argument.
IMSL_FVEC_USER, floatfvec[] (Output) A user-allocated array of size m containing the residuals at the approximate solution.
IMSL_FJAC, float**fjac (Output) The address of a pointer to an array of size m×n containing the Jacobian at the approximate solution. On return, the necessary space is allocated by imsl_f_nonlin_least_squares. Typically, float*fjac is declared, and &fjac is used as an argument.
IMSL_FJAC_USER, floatfjac[] (Output) A user-allocated array of size m×n containing the Jacobian at the approximate solution.
IMSL_FJAC_COL_DIM, intfjac_col_dim (Input) The column dimension of fjac. Default: fjac_col_dim = n
IMSL_RANK, int*rank (Output) The rank of the Jacobian is returned in *rank.
IMSL_JTJ_INVERSE, float**jtj_inv (Output) The address of a pointer to an array of size n×n containing the inverse matrix of JTJ where the J is the final Jacobian. If JTJ is singular, the inverse is a symmetric g2 inverse of JTJ. (See imsl_f_lin_sol_nonnegdef in Chapter 1, ‚ÄúLinear Systems,‚Äùfor a discussion of generalized inverses and definition of the g2 inverse.) On return, the necessary space is allocated by imsl_f_nonlin_least_squares.
IMSL_JTJ_INVERSE_USER, floatjtj_inv[] (Output) A user-allocated array of size n×n containing the inverse matrix of JTJ where the J is the Jacobian at the solution.
IMSL_JTJ_INV_COL_DIM, intjtj_inv_col_dim (Input) The column dimension of jtj_inv. Default: jtj_inv_col_dim = n
IMSL_FCN_W_DATA, voidfcn (intm, intn, floatx[], floatf[], void*data), void*data (Input) User supplied function to evaluate the function that defines the least-squares problem, which also accepts a pointer to data that is supplied by the user. data is a pointer to the data to be passed to the user-supplied function. See Passing Data to User-Supplied Functions in the introduction to this manual for more details.
IMSL_JACOBIAN_W_DATA, voidjacobian (intm, intn, floatx[], floatfjac[], intfjac_col_dim, void*data), void*data (Input) User supplied function to compute the Jacobian, which also accepts a pointer to data that is supplied by the user. data is a pointer to the data to be passed to the user-supplied function. See Passing Data to User-Supplied Functions in the introduction to this manual for more details.
Description
The function imsl_f_nonlin_least_squares is based on the MINPACK routine LMDER by Moré et al. (1980). It uses a modified Levenberg-Marquardt method to solve nonlinear least-squares problems. The problem is stated as follows:
where m≥n, F : ℜn→ℜm, and fi(x) is the i-th component function of F(x). From a current point, the algorithm uses the trust region approach,
to get a new point xn, which is computed as
xn = xc− (J(xc)TJ(xc) + μcI)-1J(xc)TF(xc)
where μc = 0 if δc≥∥(J(xc)TJ(xc))-1J(xc)TF(xc)∥2 and μc > 0, otherwise. The value μc is defined by the function. The vector and matrix F(xc) and J(xc) are the function values and the Jacobian evaluated at the current point xc, respectively. This function is repeated until the stopping criteria are satisfied.
The first stopping criterion for imsl_f_nonlin_least_squares occurs when the norm of the function is less than the absolute function tolerance afcn_tol. The second stopping criterion occurs when the norm of the scaled gradient is less than the given gradient tolerance grad_tol. The third stopping criterion for imsl_f_nonlin_least_squares occurs when the scaled distance between the last two steps is less than the step tolerance step_tol. For more details, see Levenberg (1944), Marquardt (1963), or Dennis and Schnabel (1983, Chapter 10).
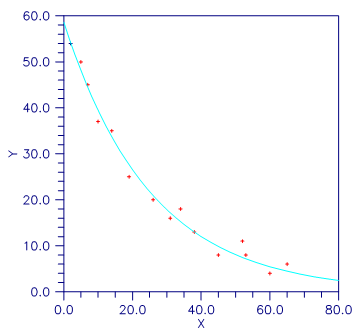
Figure 8.7 — Plot of the Nonlinear Fit
On some platforms, imsl_f_nonlin_least_squares can evaluate the user-supplied functions fcn and jacobian in parallel. This is done only if the function imsl_omp_options is called to flag user-defined functions as thread-safe. A function is thread-safe if there are no dependencies between calls. Such dependencies are usually the result of writing to global or static variables
Examples
Example 1
In this example, the nonlinear data-fitting problem found in Dennis and Schnabel (1983, p. 225),
where
is solved with the data t =(1, 2, 3) and y =(2, 4, 3).
imsl_f_write_matrix("The function values are", 1, 3, fx, 0);
} /* End of main */
void fcn(int m, int n, float x[], float f[])
{
int i;
float y[3] = {2.0, 4.0, 3.0};
float t[3] = {1.0, 2.0, 3.0};
for (i=0; i<m; i++)
f[i] = exp(x[0]*t[i]) - y[i];
} /* End of function */
Output
The solution is
0.4401
The function values are
1 2 3
-0.447 -1.589 0.744
Example 2
In this example, imsl_f_nonlin_least_squares is first invoked to fit the following nonlinear regression model discussed by Neter et al. (1983, pp. 475-478):
where the ɛi’s are independently distributed each normal with mean zero and variance σ2. The estimate of σ2 is then computed as
where ei is the i-th residual and J is the Jacobian. The estimated asymptotic variance-covariance matrix of and is computed as
Finally, the diagonal elements of this matrix are used together with imsl_f_t_inverse_cdf (see Chapter 9, Special Functions) to compute 95% confidence intervals on θ1 and θ2.
Scaled step tolerance satisfied. The current point may be an approximate local solution, but it is also possible that the algorithm is making very slow progress and is not near a solution, or that step_tol is too big.
Warning Errors
IMSL_LITTLE_FCN_CHANGE
Both the actual and predicted relative reductions in the function are less than or equal to the relative function tolerance.
IMSL_TOO_MANY_ITN
Maximum number of iterations exceeded.
IMSL_TOO_MANY_FCN_EVAL
Maximum number of function evaluations exceeded.
IMSL_TOO_MANY_JACOBIAN_EVAL
Maximum number of Jacobian evaluations exceeded.
IMSL_UNBOUNDED
Five consecutive steps have been taken with the maximum step length.
Fatal Errors
IMSL_FALSE_CONVERGE
The iterates appear to be converging to a noncritical point.
IMSL_STOP_USER_FCN
Request from user supplied function to stop algorithm. User flag = "#".